DRAWING MACHINE
– in collaboration with Daniel Castaño –
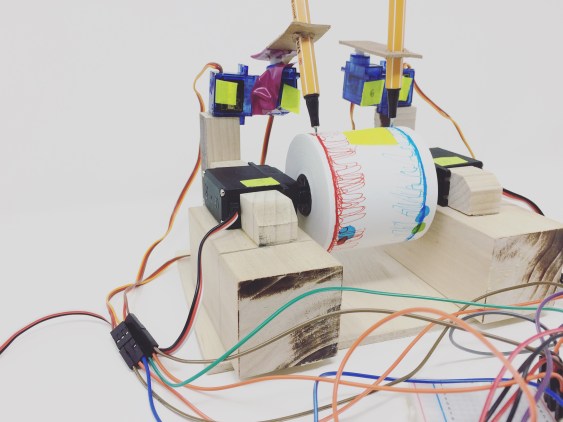
Following our previous prototypes, we decided to continue with the same aesthetic the wood was providing us. This time we made cut and sand precise pieces of wood for our machine, change the cardboard for acrylic and the tape for wood glue and nails. Because of the previous machine, we had a better understanding of the dimensions this final prototype would need. Our idea was not to hide our motors or wires but to keep them on view, take advantage of how colourful they can be, it was an important part of our design.

For the micro servos, we decided to go with acrylic, make pieces that were able to connect them both servos and with the pens. Cardboard was very important for this process, with the laser cut and many tries with cardboard we made sure our measurements were correct and not losing any valuable and more expensive material. All the pieces were thought to fit together through pressure and secured with m2 screws and nuts.

The pens needed to be easy to change and adjust to the servo arm, to be as weightless and simple as possible. We created an arm that would work as a gear or servo horn by itself and to complement it with a nut-screw system for the pen adjustment.


The acrylic connection between the motors was an idea brought up by Daniel Rozin. It took us several attempts to make a functional (complete) one piece, given the properties of the material which bends under heat, we ended up making extra for this process. for one good piece other five didn’t work due to deformity or for the fragility of the piece itself.
The size of the piece was one of the main reason the bending was difficult, a better solution would have been experimenting with 3d printing to adjust the motors and the pieces with levels within the material like the servo motors horns have where the screw goes rather than fitting through pressure. In general, they worked well for our purpose, they didn’t get loose while the servo moved (no matter how aggressive that movement was) nor they felt under the weight of the other components.

With the size of the drawing machine, the dimensions of the Stabilo mini point pens worked perfectly, the basic colours complied with our aesthetic, the trace left on the paper roll was smooth and vivid. The weight of each pen was enough for our micro servo motor arm to not collapse and work well.

For the paper roll, acrylic parts were made off to fit the gears, they fit fine but to make space for these parts the inner roll was cut on the edges of both sides as clean as possible. At the end, the cut didn’t look that nice and our transparent acrylic didn’t help at all. Even though they worked and fitted fine we decided to use the 360° servo motors round horns instead.

Part of the intention of the drawing machine is to record somehow intimate conversations or at least close ones, and even if that doesn’t happen and its all fun gibberish, we knew we wanted them close to the main mechanism and high enough to make less awkward. So, the microphones were installed at a position where they were as high, close and exposed to the mechanism as possible, also as far away from the path of any motor, pen or motor arm.

One thing we were careful while making our connections was to mind the kind of energy each of our components needed. We had 3v, 5v and 12v on our hands. Organizing and labelling the breadboard and wires was key to not fry anything or get lost in all our wires.

We started with simples codes that both of us had from previous projects or from code examples on tutorials (Adafruit’s microphones). Once each component worked on itself we combine them little by little, coming across several issues while writing our code on the way. For example, if we used delays on any motor, those delays were overwritten to all our motors; our 360° servos never stopped whenever we told them to; most of the code was always followed by a physical change in the mechanism; if the degrees on the micro servos didn’t work well we moved the started point of the arm rather than trying to go to the exact position with the code, which made the code change all the time.







Some other little bugs came along, for example, the starting movement of the motors was very aggressive, Daniel was brilliant debugging and made them go as smoothly as possible; the rolling paper go as slow as our motors let us, which allow the pens to draw the peaks of the sounds and the microphones don’t cross each other that much when exposed to the same noise, neither do the arms. A button was added to give the user some control at the beginning and end of the drawings, it also changed the enclosure design a bit.



Using our components as an aesthetic asset was always intentional, show the colourful guts of the machine was important. An acrylic enclosure was planned to hold the connections, support the machine and let the user see through it, but all fade when the weight of the machine was a little too much for a DIY acrylic enclosure, a pair of wooden blocks added to the base helped the structure but hide the Arduino and all our colourful wires in the process, a wood enclosure turned out being a better solution.

Even though our paper roll can run, we made the deliberate desition of containing it. This was closer to our project references and as a final drawing of someone’s conversation through repetition and noise. For us, these artefacts were not only pleasant and intriguing, they became the leitmotif of the whole effort.






































 The final code could be found
The final code could be found 

